Collective Perception and Decision Making in a Robot Swarm
Advisor: Prof. Radhika Nagpal, Harvard University
This research aims to improve the ability of a large group of robots to perceive and classify their environment by employing robots with different perceptual skills. The ability to make collective decisions is a critical component to developing complex collective behavior and intelligence and can contribute to the broader challenge of translating global goals to local rules.
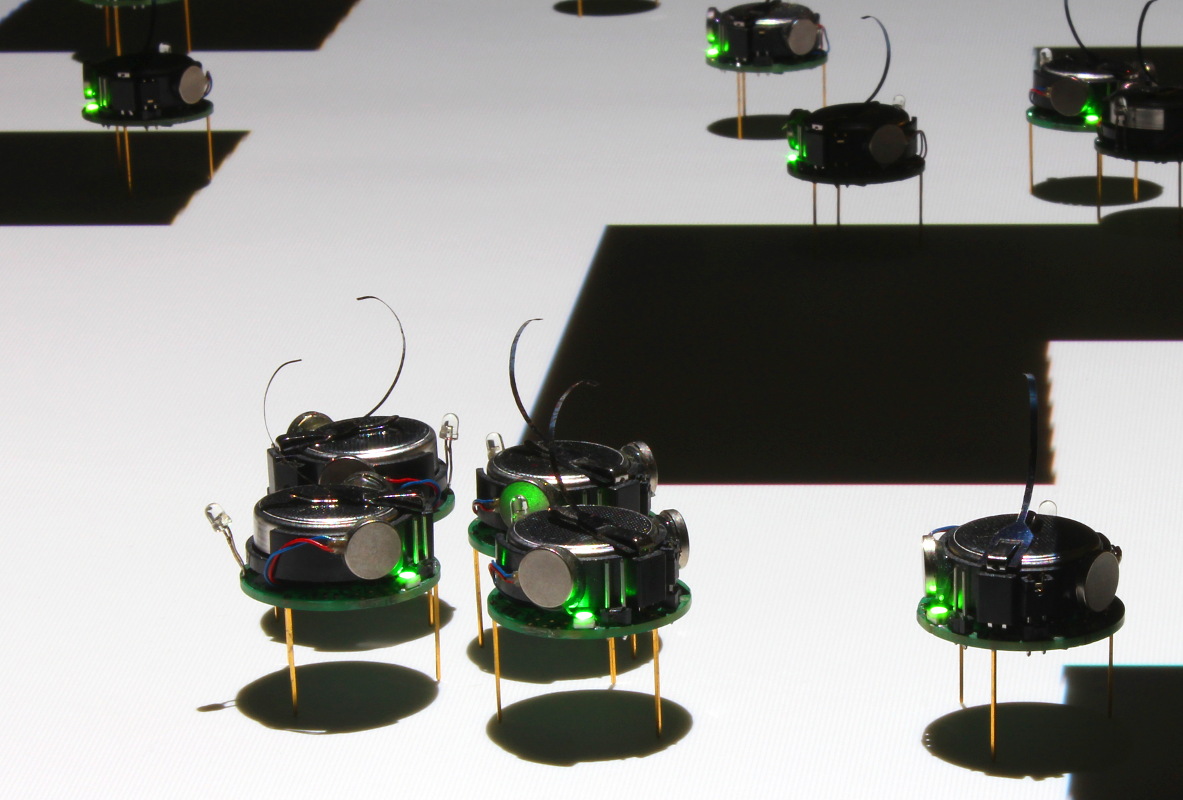
In a first paper, we demonstrated that a bio-inspired algorithm that allowed a collective of Kilobots to discriminate between multiple binary-state features simultaneously. We also explored strategies for allocating robots between features, finding approaches that proved successful even when the initial distribution of robots across features was poor.
Currently, I am developing a more general framework for distributed Bayesian decision-making in robots.
Some Results
2020. "Bayes Bots: Collective Bayesian Decision-Making in Decentralized Robot Swarms." In 2020 IEEE International Conference on Robotics and Automation (ICRA), 7186-7192.
2018. "Multi-feature collective decision making in robot swarms." In Proceedings of the 17th International Conference on Autonomous Agents and MultiAgent Systems, 1711–1719. Stockholm, Sweden.